国产福利在线视频_欧美在线不卡_国产一区视频在线_天天操网_午夜av电影_国产久
<small id="zijls"></small>
<abbr id="zijls"><strong id="zijls"></strong></abbr>
<s id="zijls"></s>
╩ūĒō
ÖCąĄłD╝ł
│╔╠ūłD╝ł
╝╝ąg╬─Ön
╬ęę¬╔Žé„
╦č╦„
Ė▀╝ē╦č╦„
┘Y┴Ž┐éöĄ(sh©┤)Ż║23475 Į±╚šĖ³ą┬Ż║0
¤ßķTĻPµIį~Ż║
╬╗ų├:
╩ūĒō
>
ÖCąĄłD╝ł
╣żśI(y©©)ÖCąĄ╩ų
╬─╝■┤¾ąĪ
Ż║ 68.76 KB
Ž┬▌d┤╬öĄ(sh©┤)
Ż║
╬─╝■įu╝ē
Ż║
Ė³ą┬Ģrķg
Ż║2014-08-30
░l(f©Ī) ▓╝ ╚╦
Ż║ 1816359964
╬─╝■Ž┬▌dŻ║
╔Žé„Ą─╬─╝■▒╗Ž┬▌d┐╔½@Ą├ĘeĘųŻĪ
ĘeĘų┐╔Ž┬▌d┘Y┴Ž╗“š▀╠ß╚Ī╚╦├±Ä┼ŻĪ
Ctrl + d ┐╔īó▒ŠĒō├µ╝ė╚ļ╩š▓žŖA
╬─╝■ĮķĮBŻ║
įō╬─╝■×ķ dwg Ė±╩ĮŻ©į┤╬─╝■┐╔ŠÄ▌ŗŻ®Ż¼Ž┬▌dąĶę¬
20
ĘeĘų
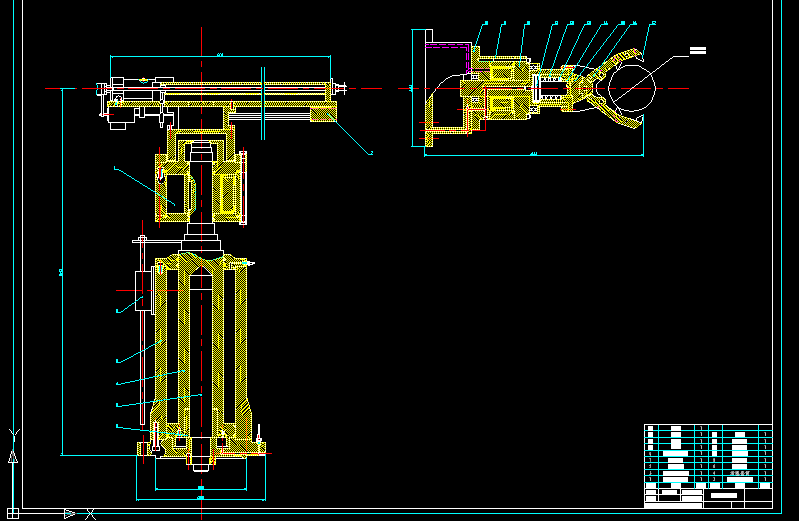
─▄─ŻĘ┬╚╦╩ų║═▒█Ą──│ą®äėū„╣”─▄Ż¼ė├ęį░┤╣╠Č©│╠ą“ūź╚ĪĪó░ß▀\╬’╝■╗“▓┘ū„╣żŠ▀Ą─ūįäė▓┘ū„čbų├ĪŻÖCąĄ╩ų╩ŪūŅįń│÷¼F(xi©żn)Ą─╣żśI(y©©)ÖCŲ„╚╦Ż¼ę▓╩ŪūŅįń│÷¼F(xi©żn)Ą─¼F(xi©żn)┤·ÖCŲ„╚╦Ż¼╦³┐╔┤·╠µ╚╦Ą─Ę▒ųžä┌äėęįīŹ¼F(xi©żn)╔·«a(ch©Żn)Ą─ÖCąĄ╗»║═ūįäė╗»Ż¼─▄į┌ėą║”Łh(hu©ón)Š│Ž┬▓┘ū„ęį▒Żūo╚╦╔Ē░▓╚½Ż¼ę“Č°ÅVĘ║æ¬ė├ė┌ÖCąĄųŲįņĪóę▒ĮĪóļŖūėĪó▌p╣ż║═įŁūė─▄Ą╚▓┐ķTĪŻ
į┌¼F(xi©żn)Į±Ą─╔·╗Ņ╔Ž,┐Ų╝╝╚šą┬į┬굥─▀Mš╣ų«Ž┬,ÖCąĄ╚╦╩ų▒█┼cėą╚╦ŅÉĄ─╩ų▒█ūŅ┤¾ģ^(q©▒)äeŠ═į┌ė┌ņ`╗ŅČ╚┼c─═┴”Č╚ĪŻę▓Š═╩ŪÖCąĄ╩ųĄ─ūŅ┤¾ā×(y©Łu)ä▌┐╔ęįųžÅ═Ą─ū÷═¼ę╗äėū„į┌ÖCąĄš²│ŻŪķørŽ┬ė└▀hę▓▓╗Ģ■ėXĄ├└█ŻĪÖCąĄ╩ų▒█Ą─æ¬ė├ę▓īóĢ■įĮüĒįĮÅVĘ║,ÖCąĄ╩ų╩ŪĮ³Äū╩«─Ļ░l(f©Ī)š╣ŲüĒĄ─ę╗ĘNĖ▀┐Ų╝╝ūįäė╔·«a(ch©Żn)įOéõŻ¼ū„śI(y©©)Ą─£╩┤_ąį║═Łh(hu©ón)Š│ųą═Ļ│╔ū„śI(y©©)Ą──▄┴”ĪŻ╣żśI(y©©)ÖCąĄ╩ųÖCŲ„╚╦Ą─ę╗éĆųžę¬Ęųų¦ĪŻ
ĘNŅÉŻ¼░┤“īäėĘĮ╩Į┐╔Ęų×ķę║ē║╩ĮĪóÜŌäė╩ĮĪóļŖäė╩ĮĪóÖCąĄ╩ĮĪŻ╠ž³c╩Ū┐╔ęį═©▀^ŠÄ│╠üĒ═Ļ│╔Ė„ĘNŅAŲ┌Ą─ū„śI(y©©)Ż¼śŗįņ║═ąį─▄╔Ž╝µėą╚╦║═ÖCąĄ╩ųÖCŲ„Ė„ūįĄ─ā×(y©Łu)³c.
ÖCąĄ╩ųų„ę¬ė╔ł╠(zh©¬)ąąÖCśŗĪó“īäėÖCśŗ║═┐žųŲŽĄĮy(t©»ng)╚²┤¾▓┐ĘųĮM│╔ĪŻ╩ų▓┐╩Ūė├üĒūź│ų╣ż╝■Ż©╗“╣żŠ▀Ż®Ą─▓┐╝■Ż¼Ė∙ō■(j©┤)▒╗ūź│ų╬’╝■Ą─ą╬ĀŅĪó│▀┤ńĪóųž┴┐Īó▓─┴Ž║═ū„śI(y©©)ę¬Ū¾Č°ėąČÓĘNĮYśŗą╬╩ĮŻ¼╚ńŖA│ųą═Īó═ą│ųą═║═╬³ĖĮą═Ą╚ĪŻ▀\äėÖCśŗŻ¼╩╣╩ų▓┐═Ļ│╔Ė„ĘN▐DäėŻ©ö[äėŻ®ĪóęŲäė╗“Å═║Ž▀\äėüĒīŹ¼F(xi©żn)ęÄ(gu©®)Č©Ą─äėū„Ż¼Ė─ūā▒╗ūź│ų╬’╝■Ą─╬╗ų├║═ū╦ä▌ĪŻ▀\äėÖCśŗĄ─╔²ĮĄĪó╔ņ┐sĪóą²▐DĄ╚¬Ü┴ó▀\äėĘĮ╩ĮŻ¼ĘQ×ķÖCąĄ╩ųĄ─ūįė╔Č╚ ĪŻ×ķ┴╦ūź╚Ī┐šķgųą╚╬ęŌ╬╗ų├║═ĘĮ╬╗Ą─╬’¾wŻ¼ąĶėą6éĆūįė╔Č╚ĪŻūįė╔Č╚╩ŪÖC ąĄ╩ųįOėŗĄ─ĻP µIģóöĄ(sh©┤)ĪŻūįė╔ Č╚įĮČÓŻ¼ÖCąĄ╩ųĄ─ņ`╗ŅąįįĮ┤¾Ż¼═©ė├ąįįĮÅVŻ¼ŲõĮYśŗę▓įĮÅ═ļsĪŻę╗░ŃīŻė├ÖCąĄ╩ųėą2Ī½3éĆūįė╔Č╚ĪŻ┐žųŲŽĄĮy(t©»ng)╩Ū═©▀^ī”ÖCąĄ╩ų├┐éĆūįė╔Č╚Ą─ļŖÖCĄ─┐žųŲŻ¼üĒ═Ļ│╔╠žČ©äėū„ĪŻ═¼ĢrĮė╩šé„ĖąŲ„Ę┤üĄ─ą┼ŽóŻ¼ą╬│╔ĘĆ(w©¦n)Č©Ą─ķ]Łh(hu©ón)┐žųŲĪŻ┐žųŲŽĄĮy(t©»ng)Ą─║╦ą─═©│Ż╩Ūė╔å╬Ų¼ÖC╗“dspĄ╚╬ó┐žųŲąŠŲ¼śŗ│╔Ż¼═©▀^ī”ŲõŠÄ│╠īŹ¼F(xi©żn)╦∙ę¬╣”─▄ĪŻ ...
╬─Ön┴¶čį
╣▓ėą
Ślįušō
“×ūC┤a:
┐┤▓╗ŪÕ│■,ōQę╗éĆ
Ė³ČÓ..
Ž┬▌d┼┼ąą
1
WY22┬─Ħ╩Į═┌Š“ÖC╚½╠ūłD╝ł
2
╗Ņąį╠┐╬³ĖĮŽõ
3
3╝ēę║ē║Ėūčb┼õłD╚½╠ūłD╝ł
4
35-50▒╝ę░═Ž└ŁÖCš²╩Į«a(ch©Żn)ŲĘłD
5
4-72’LÖCŽĄ┴ąłD╝ł║═ģóöĄ(sh©┤)
6
Ė▀Ņlš±äė├ō╦«║YĪĪ╚½╠ū CAD ĪĪłD╝ł.
7
ŠW(w©Żng)Ħ▌ö╦═ÖCš¹╠ūłD╝łūį╝║š¹└Ē
8
HP70707Ė▀ē║╝ė¤ßŲ„┐éčbłD
9
QTZ63╦■Ą§╗∙ĄAįOėŗ╩®╣żłDcadįOėŗłD
10
ļp╬³ļxą─▒├KQSN350-M9-433cadłD╝łd
Ė³ČÓ..
ūŅą┬╬─Ön
1
Ė▀Ą═ē║┼õļŖŽĄĮy(t©»ng)łD
2
Ž┤░ÕÖC
3
ą²’L│²ēm
4
äėæB(t©żi)▀xĘ█ÖC
5
22224ŽĄ┴ąŲżÄ¦ÖCØL═▓
6
0.8t-hø_╠ņĀtŻ©Č■┼┼┤¾ķgŠÓ╗ŅäėĀtĖū
7
0.75-4揥ūū∙CADłD╝ł
8
00£p╦┘ÖC┐éčbłDCADłD╝ł
9
0.75-4揥ūū∙CADłD╝ł
10
(└õä®╬³╚ļ╣▐)CADłD╝ł
¤ßķT╬─Ön
1
╗Ņąį╠┐╬³ĖĮŽõ
2
╗ņ║ŽÖC╚½╠ūłD╝ł
3
ņF┼┌╩®╣żłD
4
12#╦╔╩¾å╬╣▄CADłD-1.dwg
5
WY22┬─Ħ╩Į═┌Š“ÖC╚½╠ūłD╝ł
6
ŠW(w©Żng)Ħ▌ö╦═ÖCš¹╠ūłD╝łūį╝║š¹└Ē
7
šµ┐š░³čbÖCąĄ╚½╠ūłD╝ł
8
ļpō¶łAų∙²X▌å£p╦┘Ų„čb┼õłD╝łA0CADłD
9
Č■╝ēłAų∙ą▒²X▌å£p╦┘Ų„čb┼õłD╝łA1ca
10
LSS200¤o▌S┬▌ą²
╣żśI(y©©)ÖCąĄ╩ų_Ž┬▌d(dwgĖ±╩Į) ÖCąĄłD╝ł
ĻPė┌╬ęéā
|
ŠW(w©Żng)šŠī¦║Į
|
│ŻęŖå¢Ņ}&Ä═ų·
|
├Ōž¤┬Ģ├„
|
═ČįV&Į©ūh
|
┬ō(li©ón)ŽĄ╬ęéā
|
SiteMap
|
CopyRight 2014-2023 Š┼É█łD╝ł |
įźICPéõ2022026883╠¢-1
įź╣½ŠW(w©Żng)░▓éõ 41072402000322╠¢
ų„šŠų®ųļ│ž─Ż░ÕŻ║
97在线碰碰观看免费高清
|
国内外爱鲁吧免费网
|
四虎影院观看视频在线观看
|
成人短视频在线观看免费
|
久久一日本综合色鬼综合色
|
大学生高潮无套内谢视频
|
日本系列第_1_页_俺去了
|
91久久国产
|
亚洲a成人7777777久久
|
久久久久久久久久免费视频
|
国产成人综合亚洲怡春院
|
亚洲国产精品一区二区不卡
|
国产视频久久久久
|
99资源在线
|
久久亚洲国产最新网站
|
国产一区二区三区高清在线观看
|
色婷综合
|
成人免费的性色视频
|
国内毛片视频
|
一本一道av无码中文字幕麻豆
|
国产大学生粉嫩无套流白浆
|
久久综合狠狠综合久久
|
老司机免费在线观看视频
|
毛片在线播放观看日本
|
久久网在线
|
人妻体内射精一区二区
|
欧美成人在线免费视频
|
日本a级毛片免费观看
|
97碰碰碰人妻无码视频
|
国产91在线 | 日韩
|
97人妻熟女成人免费视频色戒
|
女厕厕露p撒尿八个少妇
|
99久久人妻精品免费一区
|
国产精品国产三级国产av剧情
|
久久综合九色综合97欧美
|
青娱乐精品视频在线观看
|
曰曰碰天天碰国产
|
久久是精品
|
乌克兰少妇xxxx做受
|
国产欧美另类久久精品蜜芽
|
亚洲av无码av吞精久久
|
 ¤ßķTĻPµIį~Ż║
¤ßķTĻPµIį~Ż║


 įź╣½ŠW(w©Żng)░▓éõ 41072402000322╠¢
įź╣½ŠW(w©Żng)░▓éõ 41072402000322╠¢